web6047 - 2026年 2月
ここは個人の趣味のページです。
昭和49年生まれ、血液型B型、男。
名前は、かわ、kawa、d_kawakawa、cookiepuddingman、平行四辺形 などいろいろあります。
工場で働いており、モノ作りが好きで小学生のころからプログラミングをやっています。
文書を書くときの助詞や助動詞、副詞などが苦手で、記事を書いて後から「不自然だな」と思ったりします。
注: ここに表示される氏名、名称と当ホームページはなんら関係ございません.
私がプログラミングを好むのは、プログラミングは私の「物づくり」に対する探求心と創造性を十分に満たしてくれるから、、です。
- 探求心:
1986 年 5 月末に発売されたファミコン版「ドラゴンクエスト」に衝撃を受け、憧れて、そのための断片的なプログラムをパソコンで作ることを楽しんできました。
断片的なプログラムとは、「マップを描画するだけ」とか、「プレイヤーキャラを動かすだけ」とかです。
そういう憧れに向かうステップ(探求)に、心躍る喜びがありました。 - 創造性:
この創造性とはアイデアを形にする喜びのことです。
もともと自分のアイデアを形にする「ペーパークラフト」や「木工」などのモノ作りが好きだったので、プログラミングとの相性が良かったようです。
憧れに向かう、形にするのが楽しくて好きだ。そんなわけで、この個人ページではプログラミングの話をすることが多いです。
ここの管理人、
AI の利用やめるってよ。
AI の問題点:
- 自分で考えずに AI を利用することで、考える力が減退する。
- 人と人との交流(教える、教わる)が減る。
- 創作物のオリジナリティが無くなる。(自分の力で作ることの喜びが減る)
- 犯罪に使われている。
- AI のハルシネーション(幻覚を見ながら語ることがある)により、人間が間違った知識を AI から学んでしまう。
- 公序良俗に反するコンテンツの氾濫。(2025/10/18追加 ChatGPT の OpenAI がそのような方針をとったから)
これらが向こう10年解決されないだろうと見込んで、やめることにしました。(2025年5月23日~)
私は AI に頼らず「自分の力」を大切にしたいです。
…とはいえ、人間は新しく見つけた技術を手放すということは基本的にやらないと思います。
だから私も後々 AI を利用することにはなると思います。
でも上記の問題点は確かなもので、将来 AI ロボが私の家の扉をコンコンと叩いて
「市からの要請で、お手伝いするため おうかがいしました」
と言うまでの間は、この AI 技術を導入せず、頑張ってみようと思います。
でもこの考え方、キツイと思うのでマネしなくていいです。
- Special Documents -
特別な記事へのリンク

サンプル動作環境の作成方法




ゲームコーナー
(↑, ↓, ←, →)

(←, →, ↓, z, x)

その他 単発のアプリ




- 以降は日記です -

2026年2月6日
生活 オークション
PC DOS J6.1/V
30年前の OS、「IBM PC DOS J6.1/V」に入札中ですね。

バージョンの異なる、PC DOS J6.3/V ではダメで、
PC DOS J7.0/V でもダメ。
PC DOS 2000 でもダメ。
「J6.1/V」でなければダメなんですね。
2024年6月8日の私の日記で
『486 オークションで「IBM PC-DOS J6.1/V」を買った』
と題して、同じ 「IBM PC DOS J6.1/V」を買っているんですが、買ったものは「プリロード用」というもので、インストールディスクは 9 枚あるはずなのにパッケージに入っていたのは 1 枚だけでした。
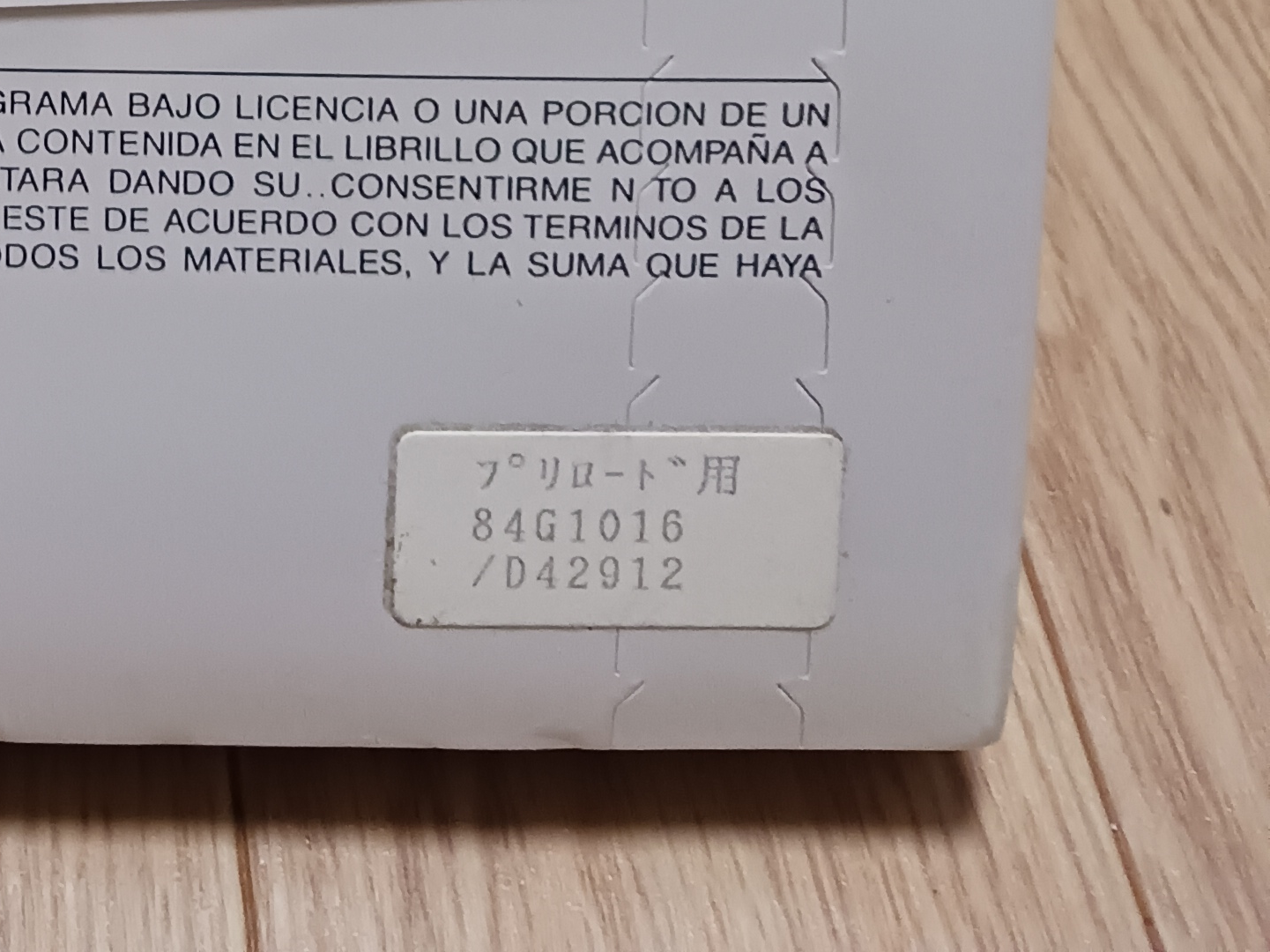
「プリロード用」という表現が何を意味するのかいまだにハッキリと分かりませんが、たぶん、パソコンにプリインストールされた OS のために、「紙製のマニュアル」と、何かあったときの「救済用ディスク」(インストールディスク 9 枚のうちの最初の 1 枚が救済用として使える)を1つのパッケージにして提供するもの、で、売り物ではなく、プリインストール済みのパソコンに同梱させる種類のものだと思います。
だから開封されることなく企業の倉庫にまとめて保管されている、、、
それを今の時代になってオークションで競売にかけているんですね。
1 枚だけでインストールを行うと、途中で「2 枚目をセットしてください」と言われ、でも 1 枚しかないのでそこでインストールは中止。
その状態でシステムを再起動すると一応 OS は起動する。。でもインストールディスク残り 8 枚分の機能はナシ。
「プリロード用」に付属してた冊子類が部屋に転がっていて、その冊子の中に「日本語入力マニュアル」なんてものがあるけど、日本語入力の機能はインストールされないので、あっても困る。でも買ったものなので捨てられない。。
そういう、期待に対して半端な状態、散らかった状態で前回終わっていたので、その半端、散らかりを解決すべく今回また購入したわけです。
6.1/V ではなく 7.0/V とかだと似た OS がダブることになるので、ちゃんと同じ 6.1/V を選んで半端状態を直す必要があるんです。
「購入した」と書いたけど、まだオークション中です。(気が早い)
オークションで競うつもりはゼロなので、私が入札した金額 6,000 円よりも高い金額が入札されたらそれで終わりです。
自分が出して良いと思った上限金額で入札して「自分一人で無事購入できるか」、または「覆されて(高値入札されて)一度も反撃せず(私から再入札せず)に終わるか」の2つしか私は見ていなくて、
オークションの醍醐味である「競る」というのは私は全然やりたくない。
競売で白熱して自分の制御を失うと分かっていて、分かっているなら最初からやらないって感じかな。
私が私のためにではなく、誰かのために私がいくらでもお金を出して買い上げて、その誰かに品物を渡してあげる、というのであればやるけど。
2026年2月8日追記:J6.1/V は落札できましたねぇ。良かった。
ゲームブック
他にオークション/フリーマーケットでほしいと思っているのは、

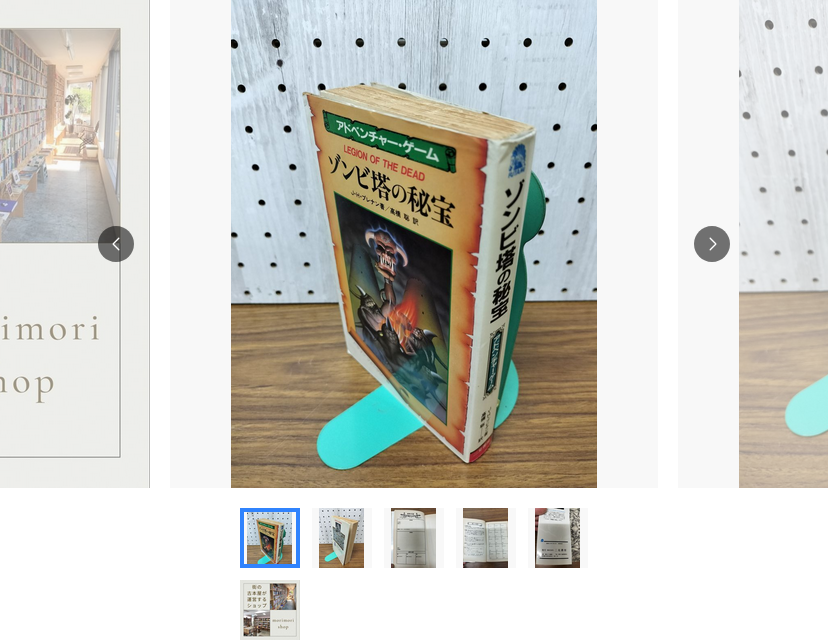
イギリスの J.H.ブレナン氏著「グレイルクエスト(聖杯探求)シリーズ(日本シリーズ名はドラゴンファンタジーシリーズ)全8巻」のうち、6 巻目「宇宙幻獣の呪い」と、8 巻目「ゾンビ塔の秘宝」。
それぞれ当時は 700 円程度の本でしたが、今では普通に 5,000 円 ~ 10,000 円で取引されています。
シリーズのあとのほうの巻ほど、当時の購入者が少なくて、出回っていないせいか、特別高価になっていて、10,000 円くらい出さないと手に入りません。
本の内容は、冒険の場面ごとに番号が振ってあり、読み手の意思によって行先 番号を選ぶことができ、冒険を疑似体験できるというもので「ゲームブック」と呼ばれています。
ヨーロッパのアングロ・サクソン時代に生まれた「アーサー王伝説」という物語が舞台で、現代の読者が魔法使い「マーリン」の魔法によってこの物語の中に呼び出され、ピップという名の若者に成り代わって、ドラゴンを倒したり魔術師を倒したりと冒険することになります。
剣と魔法の世界であり、数々の冒険にあふれており、当時の小学生たちの心をつかんでいたので、私の RPG 開発の助けになると考えて、集めている次第です。
当時私は小学生で全巻そろえていましたが何かのきっかけで処分してしまったんですね。
全 8 巻のうち 6 巻は購入済みで残り 2 巻ですが、10,000 円前後で高すぎでなかなか買えず、出品されてもスルーしている状態です。
カビてるプロファイラ
その他「Turbo Profiler」というプログラミングツールも、この前バージョンの低いものを 2,500 円で購入しました。

5インチフロッピーディスクで、中の磁性体はしっかりとカビており、そのままディスクドライブに入れるとカビをまき散らし他のディスクにうつって次々とディスクを破壊していく大惨事が起こるので、カビを除去する処置(マイクロファイバーの布に IPA(イソプロピル・アルコール)という溶剤を染み込ませ、磁性体をゴシゴシと拭く)をしてからドライブで読み取れるかどうかこれから試すところです。
それら3つは事業展開ツールであ~る
以上の通り、PC-DOS、ゲームブック、プロファイラと、どれも私がやろうとしている事業に関係するものばかりです。
古いパソコン環境でゲームを作り、売り出すことを考えています。
PC-DOS や MS-DOS は今でも普通に値段が付いているし、それがカビていれば利用できず、ゲームで遊ぶのは困難となります。
でも、DOS を使わずに直接パソコンのハードウェアにアクセスする方式(マシン語)であれば、「エミュレーター+そのゲーム」で完結でき、実現可能です。
その手法(マシン語)が困難な場合は、FreeDOS というフリーウェアの DOS を利用することも可能です。
古いパソコンで性能が低いからそのゲームは面白くないということはないはずです。
本当に良い物であれば、人々はその作品に対して価値を認め、お金を払ってくれると思います。
できないと思っている人にはいつまでもできることはなく、できると思っている人にこそ その道が開かれる(できる)、古い友達が昔そんなことを言っていました。
それは確かにそうだと思います。
(訪問者のどんなニーズと この記事がつがるか)
- 日記を読みたい
2026年2月8日
プログラミング 人体描画システム
ラジオ体操
- ♪腕を前から上にあげて、大きく背伸びの運動 からっ
背筋を十分に伸ばしましょう - ♪手足の運動~
さあ、かかとの上下運動をしっかりと行いましょう - ♪腕を回します
外回し、内回し、5,6,7,8
人体にラジオ体操をさせようと思って、この3番の「腕を回します、外回し」のところで、ラジオ体操、人体の動きというのは意外と複雑な動きだということに気づきました。
この動画では最初の部分は編集の都合で高速動作でシャキシャキ動いて飛ばしてます。
最後で外回しをやろうとして途中で動画は終わります。
正面だと分かりにくいですけど、横から見るとこう。
最後の方で変な動きになっています。
ラジオ体操で「腕を上にあげて降ろす」という動きは意外と複雑で、
上にあげて降ろすとき、腕は降ろしながら「ひねりも加わっている」んですね。
そこでラジオ体操の作成は一時止めて、別途試作を行ったのが下の動画です。
現状のシステムでなんとか再現できないかとやってみたんですが、この動画ではひねりが一瞬で行われています。
見分けがつかないほどに一瞬です。
上腕二頭筋の部分だけ赤く色を塗っていて、それが見えたり消えたりしていますが、腕を一瞬でひねっているからそう見えています。
徐々にひねりながら降ろすという動きは、現状のシステム、私の考え方では、「そのままではできない」ということが、システムがほぼ完成に近づいた今の時点で発覚してしまいました。
クォータニオンを導入したのに、x, y, z の個別回転(オイラーによる回転)も一部でまだ使っているので、それ(オイラー回転の問題点であるジンバルロック)が影響して、回転表現を困難にさせているんですね。
そこで、現在作成中のシステムとは別に新しく一から試作プログラムを作って、ひねりながら回すというものを冷静になって作ったのが下の動画です。
緑の小さな物体を中心にして、赤い大きな立方体が左右に振子運動をしていますが、同時にスピン(ひねり)の回転もしています。
プログラムとしては、
- まず「回転の無い静止状態」にひねりの回転を行い、
model.quaternion = makeRotationQuaternion( [ 0, 1, 0 ], theta );
「クォータニオンを使って」みたいに言うと、クォータニオンを使ったことがない人や、使い方がよく分かっていない人にとっては、"時代は先行くメガドライブ" じゃないけど、「わかんない話されちゃってるよ」みたいに思うと思います。
私のホームページって、私が分かっていていろいろ説明するわけですが、なるべく何も知らない人にも分かるようにという思いはあるものの、結局、難しい感じになっているみたいです。たぶん。
「Y軸を中心に、点を何度回転する」ということをやりたくて、
makeRotationQuaternion( [ 0, 1, 0 ], theta )
という命令を出すわけです。
Y軸 [ 0, 1, 0 ] を中心に、点を theta 度回転する、という意味でその命令を出し、その結果が
model.quaternion に代入されます。
クォータニオンは「魔法の鍵」みたいなデータで、点に対して魔法の鍵を「当てる」と、その点は回転するんですよね。
不思議なもんです。
- そこへ「左右に回す回転」を加えます。
multiplyQuaternions( model.quaternion, furikoQ );
その魔法の鍵にさらに別の魔法の鍵を掛け算します。
model.quaternion は「ひねりを加える回転」となっていますが、そこへ furikoQ という「左右に回すクォータニオン」を別途用意して、掛け算します。
掛け算すると、「ひねりつつ、左右に回る」ということができるって話です。
…で、この furikoQ はさらに特別な魔法で作られていて、それは「球面線形補間」(スフィアリカル・リニア・インターポレーション)という必殺技みたいな技術なんです。
furikoQ = shpericalLinearInterpolation( leftQ, rightQ, time );
もうついてこれている人はほとんどいないと思うんですけど、
回転していない状態から、振り子として左にいっぱいに回転した状態の leftQ と、
振り子として右にいっぱいに回転した状態の rightQ を指定し、左を 0、右を 1 としたとき、どのあたりまでの回転がほしいのかを time で指定します。
time が 0 なら左いっぱい、0.25 ならやや左、0.5 なら真ん中(回転していない状態と同じ位置)、0.75 ならやや右、1 なら右いっぱいといった具合です。
sphericalLinearInterpolation() は二つの回転状態のあいだを time を指定することで、「そこまで回転するクォータニオン」を都合よくゲットできる、というものです。
time が 0 から 1、1 から 0 へスムーズに動けば、「そこまで回転するクォータニオン」をその都度得ることができ、そしてそのクォータニオンを継続的に点に当てれば、その点は振り子運動をする、という寸法です。
sphericalLinearInterpolation() は略して、slerp() 、スレープと呼ばれています。
私は略さないほうが好みなので、フルネームで呼んでいます。
;){kind=link}
;){kind=link}
;){kind=link}
;){kind=link}
;){kind=link}
sphericalLinearInterpolation() はクォータニオンを使った代表的な機能のひとつなので使えたほうが良いでしょう。
私は鳥山明が好きなんで、同氏の絵柄がちょっと入っています。
だから亡くなったときはガタンって心の中で何かが崩れる感じがしました。
(訪問者のどんなニーズと この記事がつながるか)
- クォータニオンの話
- 面白いものを見たい
- 日記を読みたい
2026年2月12日
486 PC DOS J6.1/V
オークションで購入した「PC DOS J6.1/V」が届いたので、Windows 11 へ取り込みします。
その前に、「PC DOS J6.1/V」と聞いても何のことか分からない方のために、ちょっとした年表を作ってみました。
OS の主流を背景色 黄色で示しています。(※DOS には他に MS-DOS もあります)
| PC DOS 発売日 | PC DOS バージョン | Windows 発売日 | Windows バージョン |
|---|---|---|---|
| 1991年10月 | IBM DOS J5.0/V | ||
| 1992年4月6日 | Windows 3.1 | ||
| 1993年12月 | PC DOS J6.1/V(今回買ったもの) | ||
| 1994年5月 | PC DOS J6.3/V | ||
| 1995年8月 | PC DOS J7.0/V | ||
| 1995年11月23日 | Windows 95 | ||
| 1998年6月 | PC DOS 2000 日本語版(最終ver) | ||
| 1998年7月25日 | Windows 98 | ||
| 1999年12月24日 | Windows 2000 | ||
| 2000年9月23日 | Windows Me | ||
| 2001年9月6日 | Windows XP | ||
| 2006年11月30日 | Windows Vista | ||
| 2009年9月1日 | Windows 7 | ||
| 2012年8月16日 | Windows 8 | ||
| 2015年7月29日 | Windows 10 | ||
| 2021年10月5日 | Windows 11(現在) |
OS の主流は Windows 95 の登場により、DOS の「黒い画面でのコマンド入力」から「デスクトップ画面での GUI 操作」に代わりました。
表のとおり、「PC DOS J6.1/V」はコマンド入力の時代の OS なんですね。
Windows 3.1 や、Windows 95 は、PC DOS や MS-DOS の下で動く1つのアプリとして動いていたんですよね。
「PC DOS J6.1/V」はそういう位置づけの OS です。
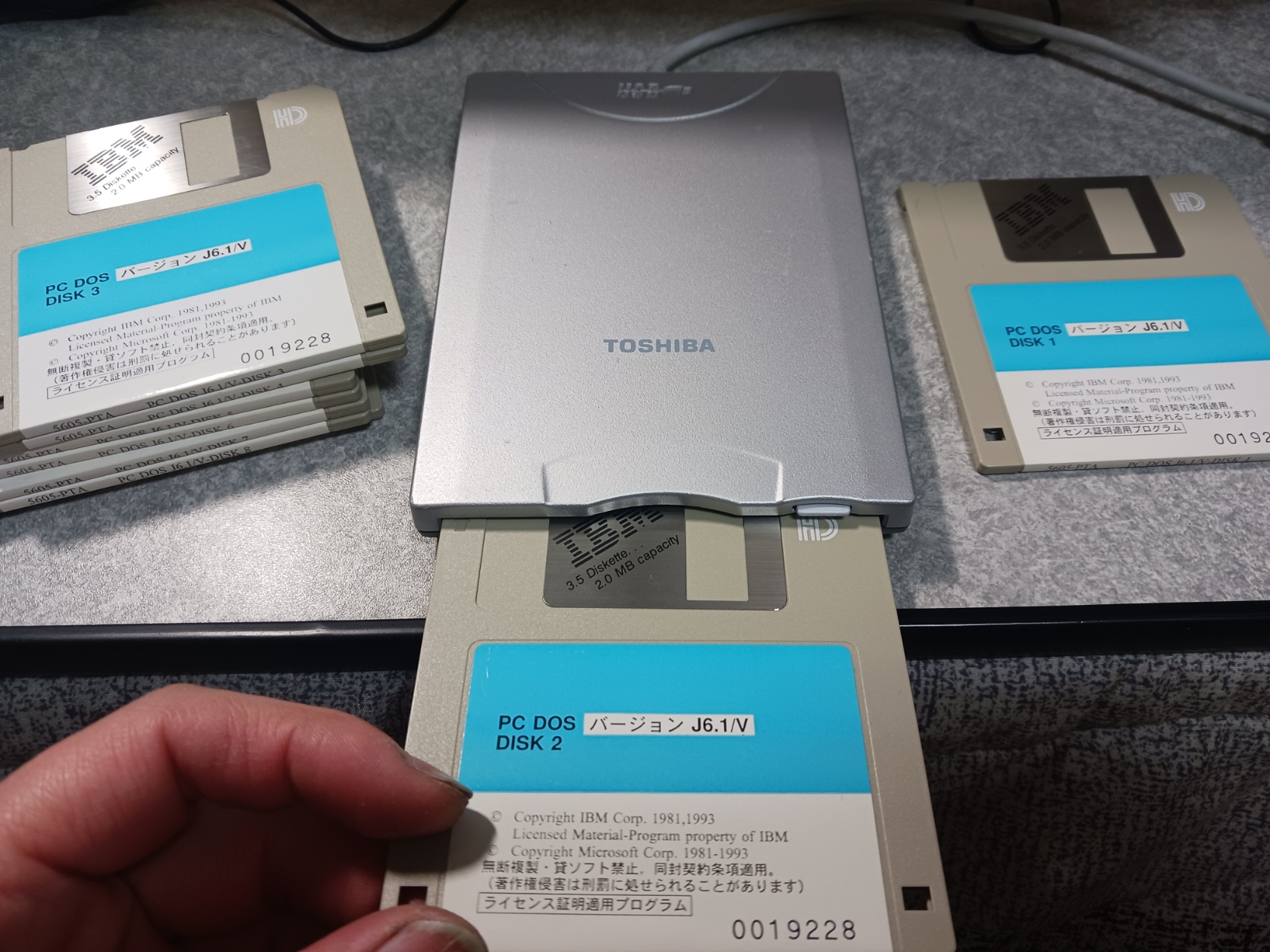
オークションで購入した 9 枚のディスクを「USB フロッピーディスクドライブ」に 1 枚ずつ入れていきます。
入れる前にざっとカビ確認はしました。
フロッピーディスクのシャッターを開けて中の磁性体にカビがないか確認します。
9 枚確認するのは面倒なので、適当にピックアップして2、3枚程度確認して良しとしました。(それでだめな場合はあり得るんですけどね)
挿入したフロッピーディスクをドライブが読み込んでいる様子です。
カシャッ、シャコン、ブーン、カタンカタンカタン…
プープー、プープー、カタンカタンカタン…
という感じで音を立てます。
古い車のエンジン音のように心地良いんですよね。
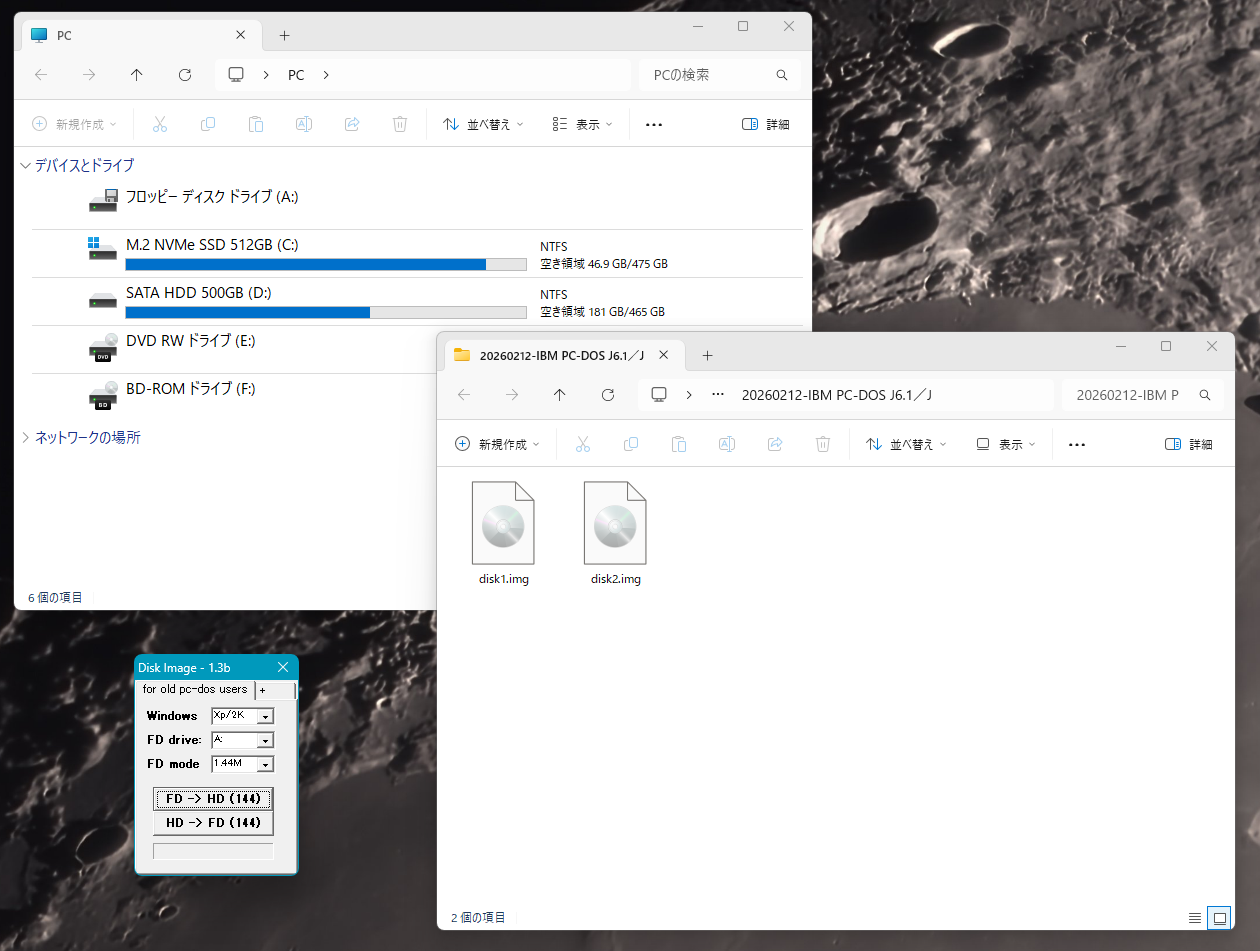
エクスプローラーでは「フロッピー ディスク ドライブ(A:)」として表示されています。
左上図左下に小さく「Disk Image - 13b」(ディスクイマージュ、リンクは Vector へ)というソフトウェアのウィンドウが表示されています。
このソフトウェアを使ってフロッピーディスクの内容をそっくりファイルに変換します。
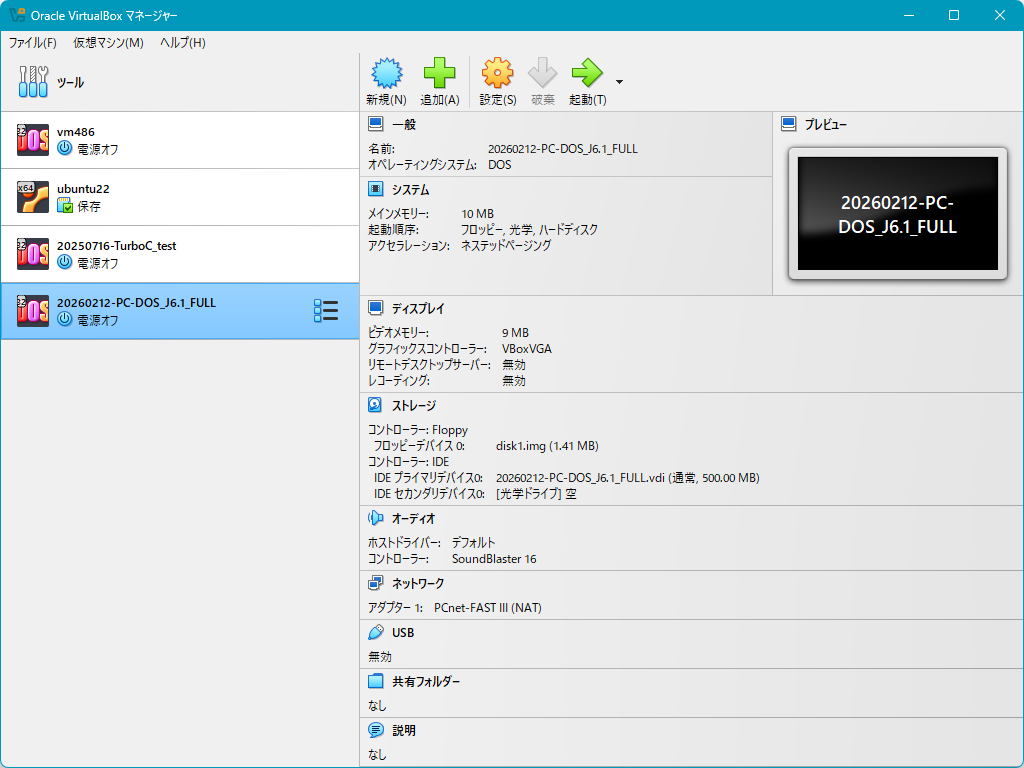
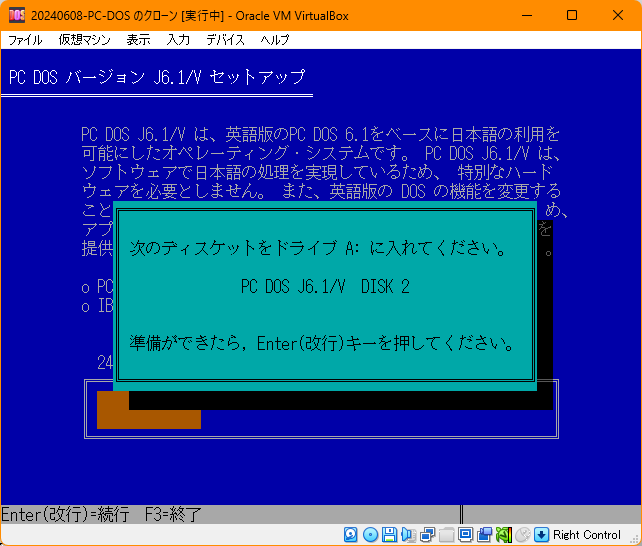
この PC DOS を動かすエミュレーターとして、「Oracle VirtualBox」を起動します。
設定は左上図のようにしており、ストレージ>フロッピーデバイスに、取り込んだディスク(ファイル)の 1 枚目 disk1.img をセットしています。
起動ボタンを押すと、ソフトウェアで再現された「仮想パソコン」はフロッピーディスクの 1 枚目(disk1.img)を読み取り、左上図の通り「PC DOS セットアップ・プログラム」が動き出します。
…このような形で過去のソフトウェアは動作するわけです。
簡単そうに見えますが注意点があります:
- もし購入したフロッピーディスクの中身の磁性体がカビていたら、そのフロッピーディスクは読めないおそれがあります。そればかりか、カビてるディスクをドライブに入れると、読み取りヘッドが確実にカビに汚染されます。そのことに気づかずに別のディスクを入れると次々とカビをまき散らし、複数のディスクが使えなくなる大惨事が起こります。
- DOS/V のフロッピーディスクなら(たぶん)普通の「USB フロッピーディスクドライブ」で読めますが、PC-9801 のソフトウェアを購入した場合、そのフロッピーディスクは普通のドライブでは読めません。「スリーモード対応の USB フロッピーディスクドライブ」が必要です。上記で私が使っているドライブがスリーモード対応です。
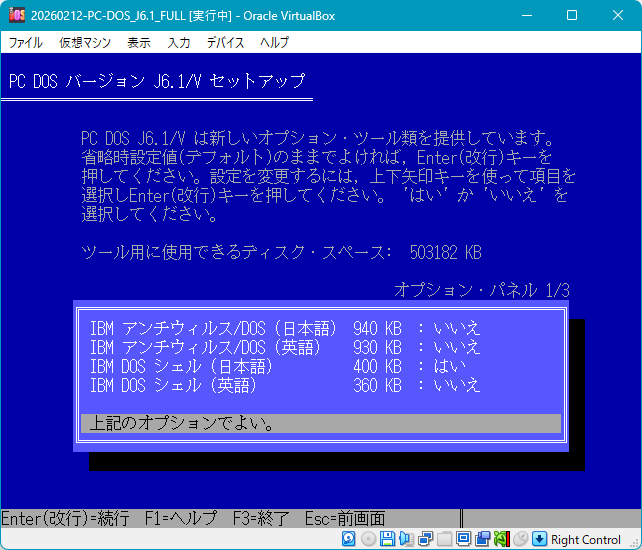
セットアップへようこそ、の画面です。
古い OS のインストールの様子です。1
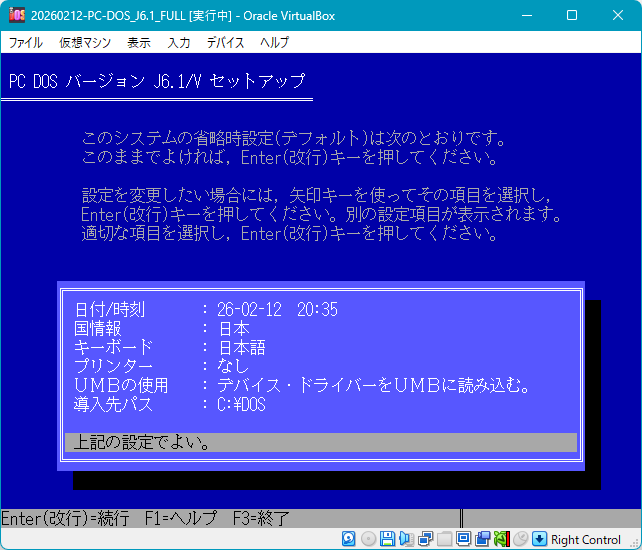
UMB とはアッパーメモリーブロックの略で、メモリーのスキマ部分のことですね。
昔はメモリーが 640KB しかなかったので、そういうスキマが使えることはとても重要でした。
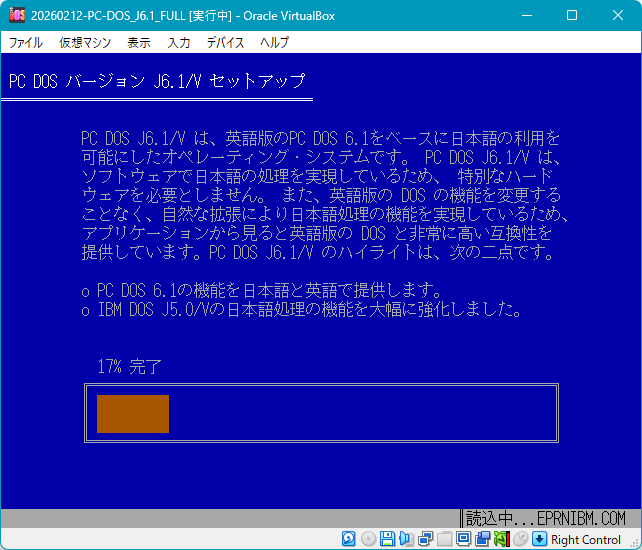
古い OS のインストールの様子です。2
古い OS のインストールの様子です。3
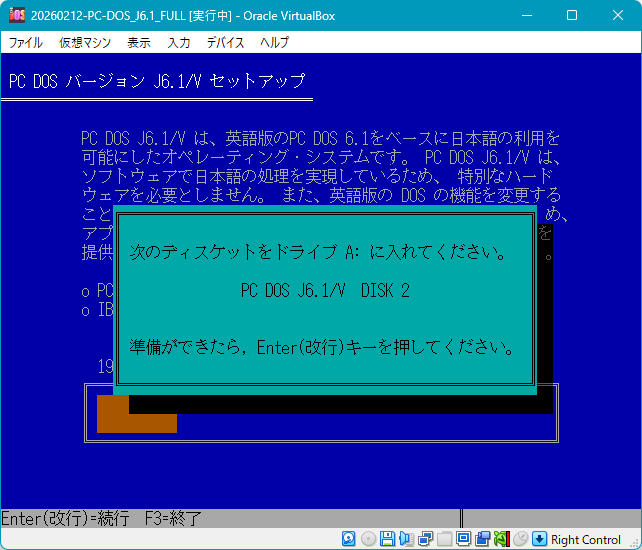
前回、PC DOS J6.1/V を購入したときは「プリロード版」だったのでディスクが 1 枚しかなくて、ここで中断していましたが、今回は 9 枚すべてそろっているので、この先に進めます。
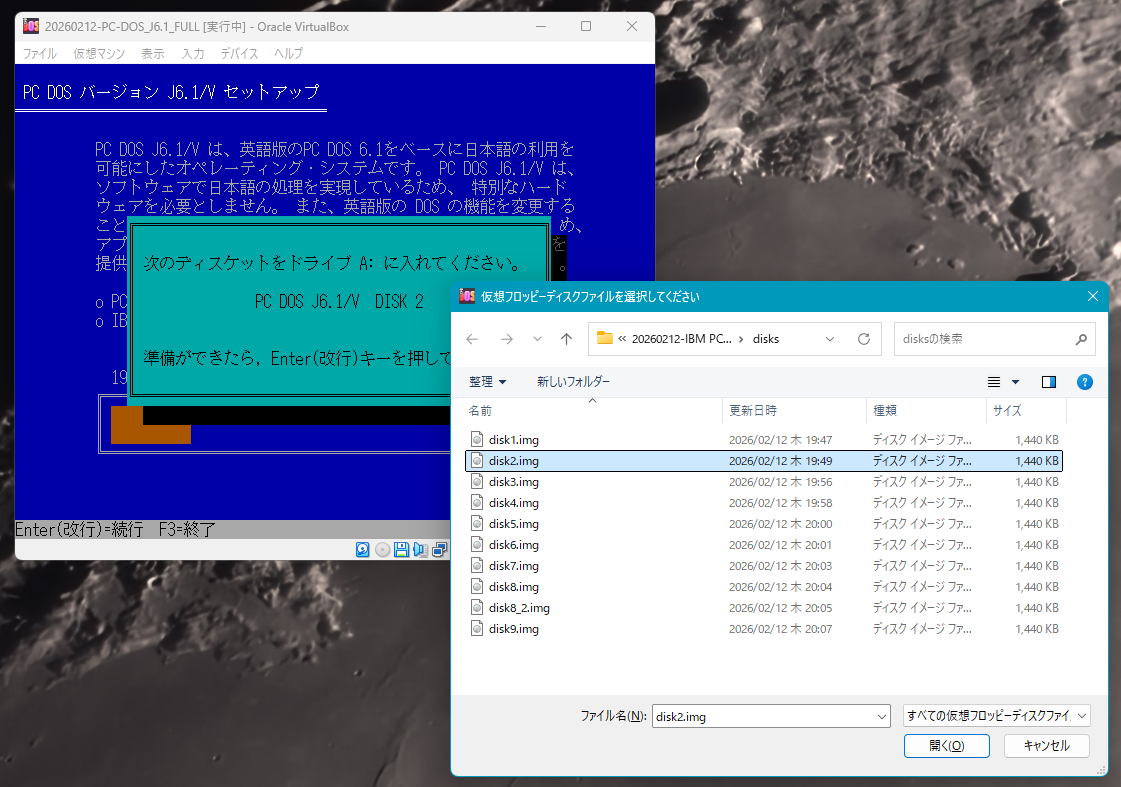
VirtualBox の「デバイス メニュー」からフロッピーディスク挿入を選び、disk2.img を指定します。
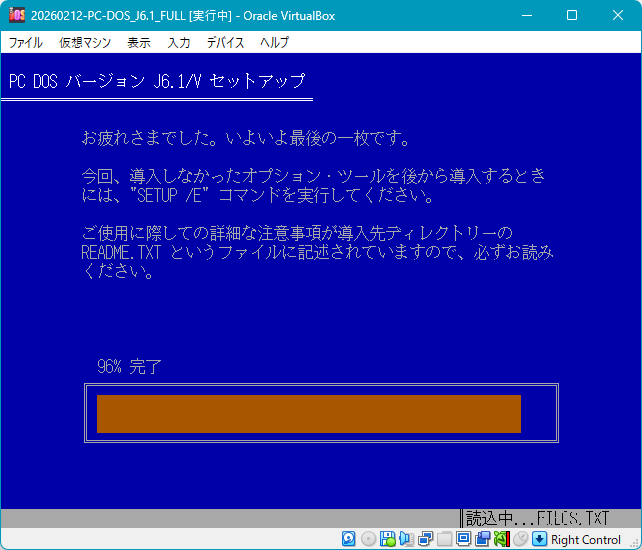
インストールはもうすぐ終了。
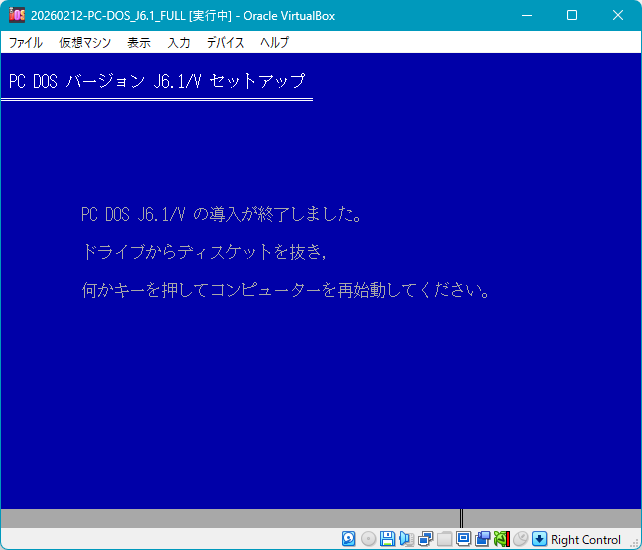
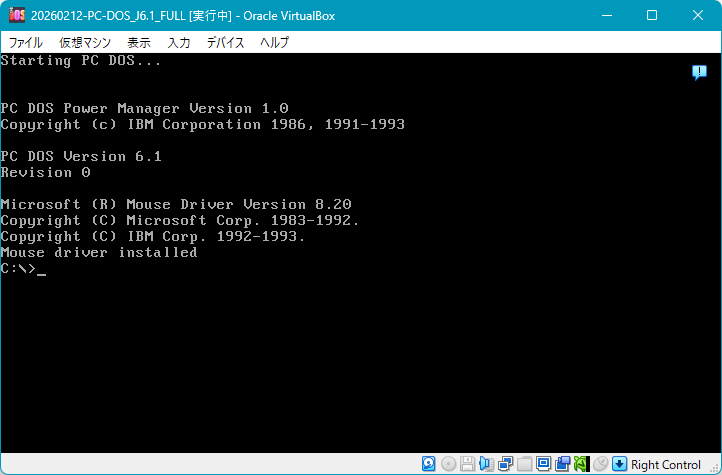
「デバイス メニュー」からフロッピーディスクの取り出しの操作を行ってから、「仮想マシン メニュー」のリセットを選びます。
Starting PC DOS...
Loading font files ...
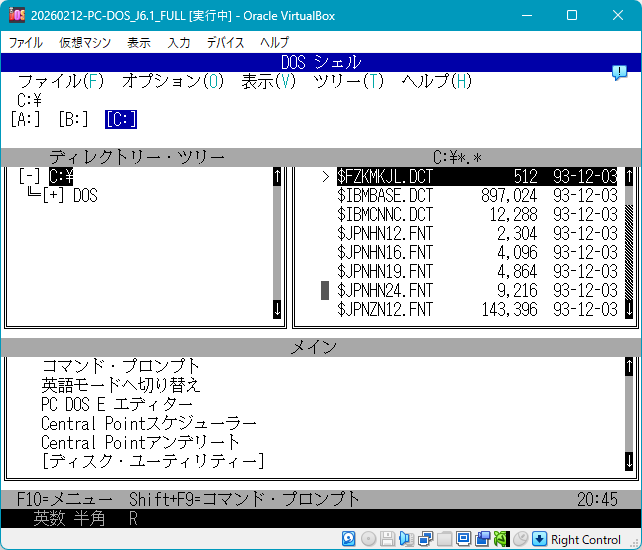
PC DOS が起動すると、すぐに「DOS SHELL」の画面となります。
この画面って MS-DOS の後のほうのバージョンにもあったけど、私は全然使ったことがありません。
とりあえず、ゲームか何か面白い物ないかな~と小学生みたいに思ったけど、なーんもありませんでした。
そういえば、DOS って昔からなーんも入っていなくて、ゲームが用意されるのは Windows 3.1 とか Windows 95 からだったんですよね。
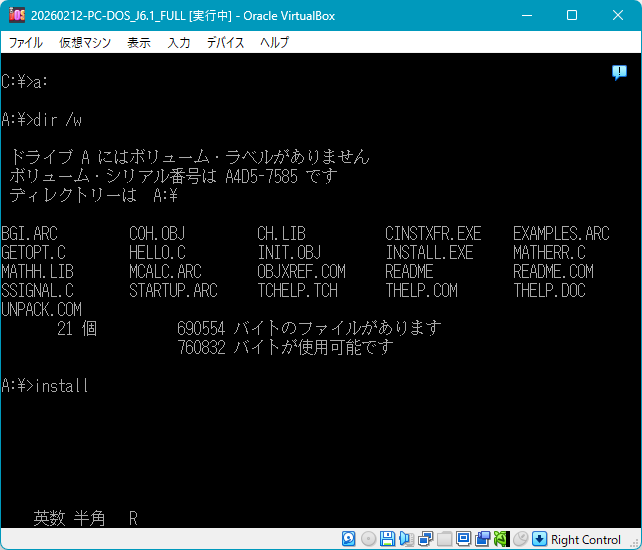
そういえば、Borland(現embarcadero)の「アンティークソフト」の公開で英語版の「Turbo C」をダウンロードして取っておいたのを思い出して、インストーラーディスク(ファイル)を「挿入」して INSTALL.EXE を実行したら、そのままフリーズしました。
あれ?なんで?と心配になりました。
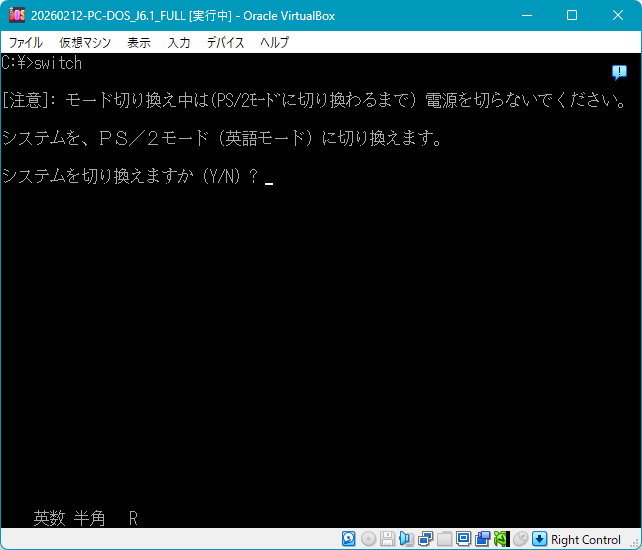
DOS って日本語環境だといろいろシステムをいじっているので、英語版とか環境違いのソフトウェアを実行するとうまくいかない、、、
なので、この PC DOS って「英語モード切替」とかないのかと思って調べたらありました。
switch コマンド。
即席の場合は chev コマンドだそうです。
change environment の略かな。
英語モードで再起動しました。
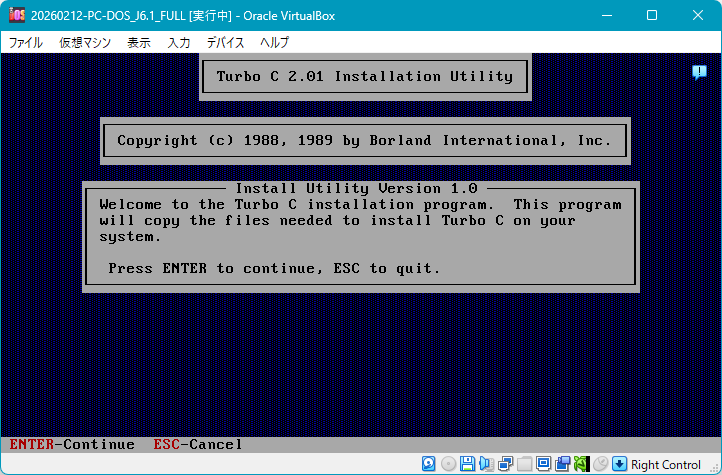
再度 INSTALL.EXE を起動すると、起動できました。ホッ
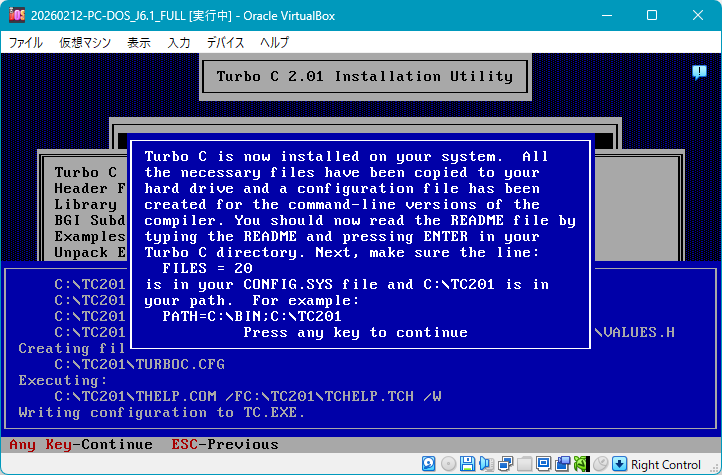
"Turbo C はあなたのシステムにインストールされました"
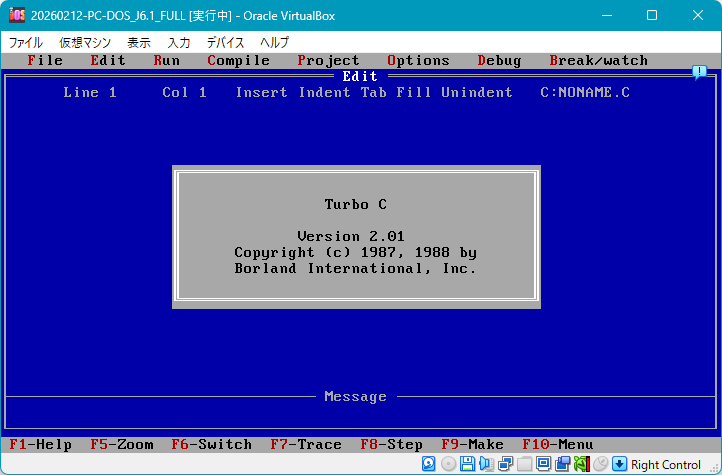
古い C 言語開発環境の起動です。
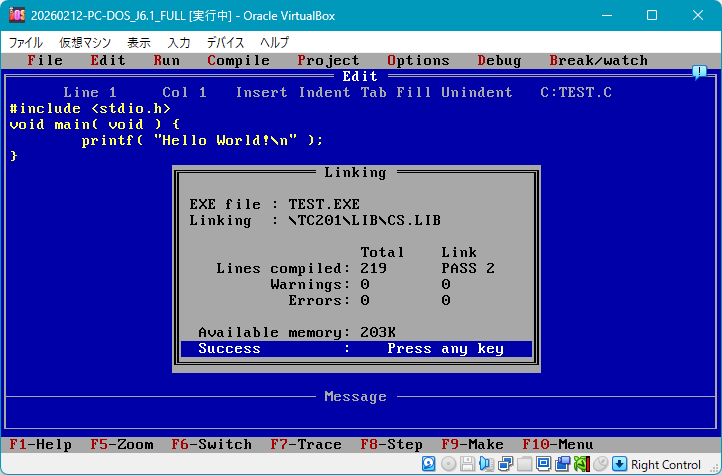
ハローワールドを入力してコンパイル。
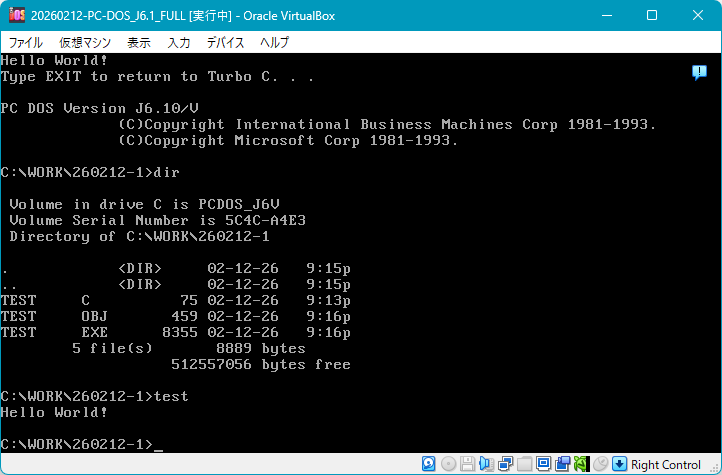
ハローワールドを実行したところ。
ここにやはり、宇宙ともいえる可能性を感じずにはいられません。
Windows 11 は便利だけど、この広大な可能性がすぐそこに広がる、「宇宙」がないんだよなぁ。。
紙製のマニュアルの1つを開くと、なんとカラー!
昔はこういうところにちゃんとお金をかけて作っていたんですよね。
このカラーの紙面から感じられる会社の姿勢。
ユーザーに良い物を提供しようという姿勢が感じられます。
幸せな時代だったんですよね。
(訪問者のどんなニーズと この記事がつながるか)
- レトロPC(PC DOS)の話
- 個人的なパソコンライフの話
- 日記を読みたい
2026年2月15日
プログラミング 人体描画システム2
ラジオ体操のアニメを作っていて、「ポーズ決め」がうまくいかないので、ポーズ(姿勢)のエディタを作りました。
ドラクエの堀井雄二氏もポートピアだったか、オホーツクだったか、何かのソフトを作るときに CG を描くソフトが手元になかったので自作したそうです。
メインのプログラムで使う「データ」を用意するために別途ソフトウェアを作成するというのはプログラマーにとってはよくやる作業だと言えます。
>ちなみに、ポートピアに登場するグラフィックは氏の手によるもので、
>「学生時代にはマン研にいまして、もう7~8年描いてるんです。容疑者の顔なんかユカイでしょ?
>あれは自作のピクチャーエディタを使って、画面上にドンドン描いていったんです」
>と語っていた。
https://game.watch.impress.co.jp/docs/kikaku/1648554.html(リンク先で、文字列を強調表示します)
世の中で成功している人ってうらやましいですね。
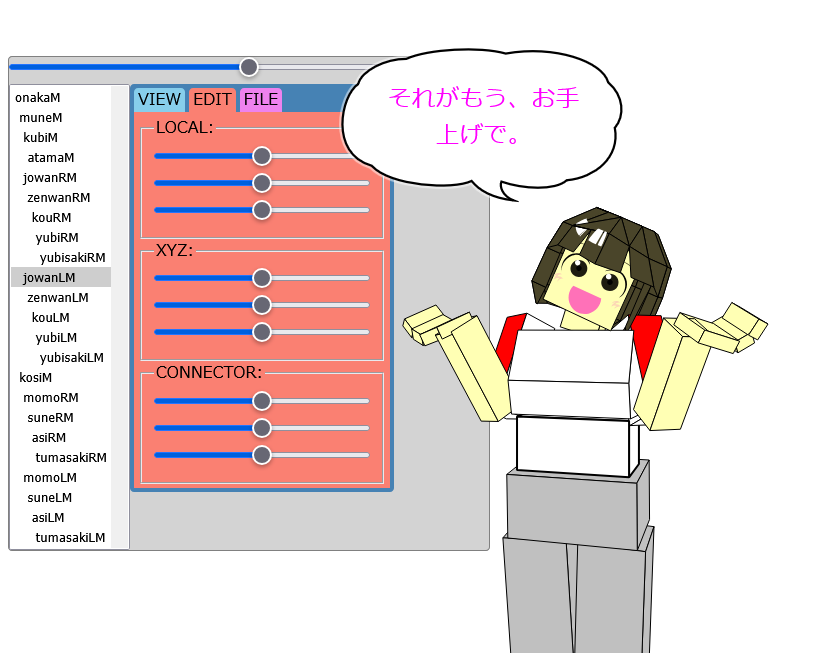
▼GUI のスライダで回転することで表現力が格段にアップしました。
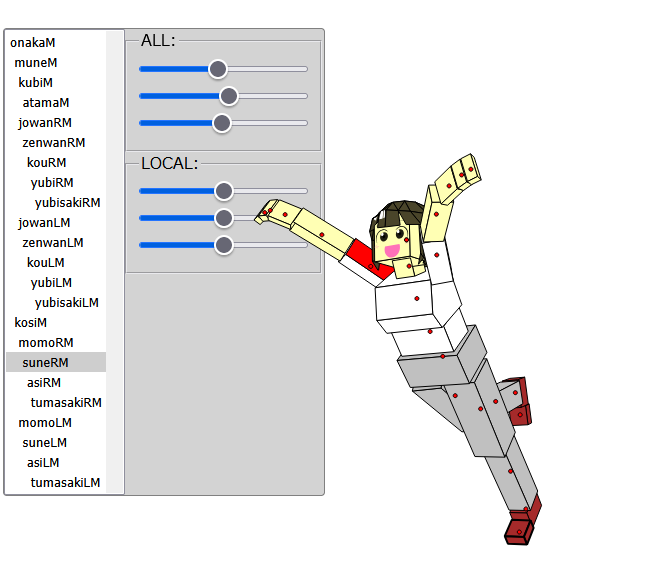
▼とにかくどんなポーズも短時間で作成できます。
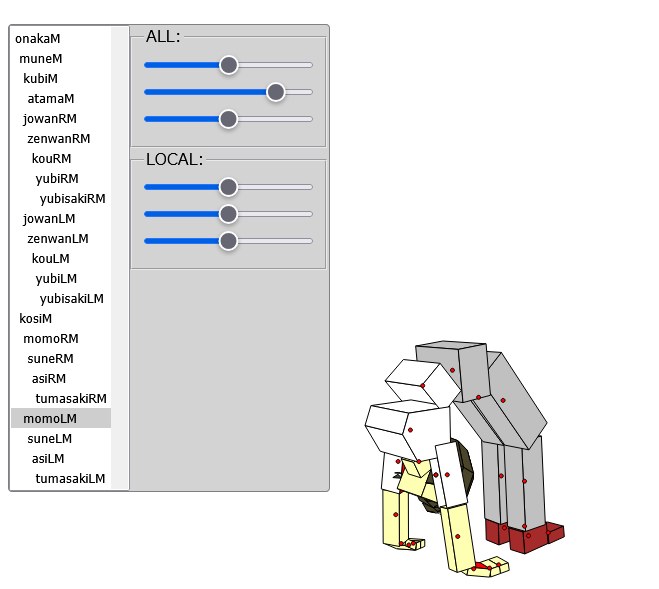
▼人体作成システムをベースにこのエディタを作っているので、ふきだしも表示可能です。
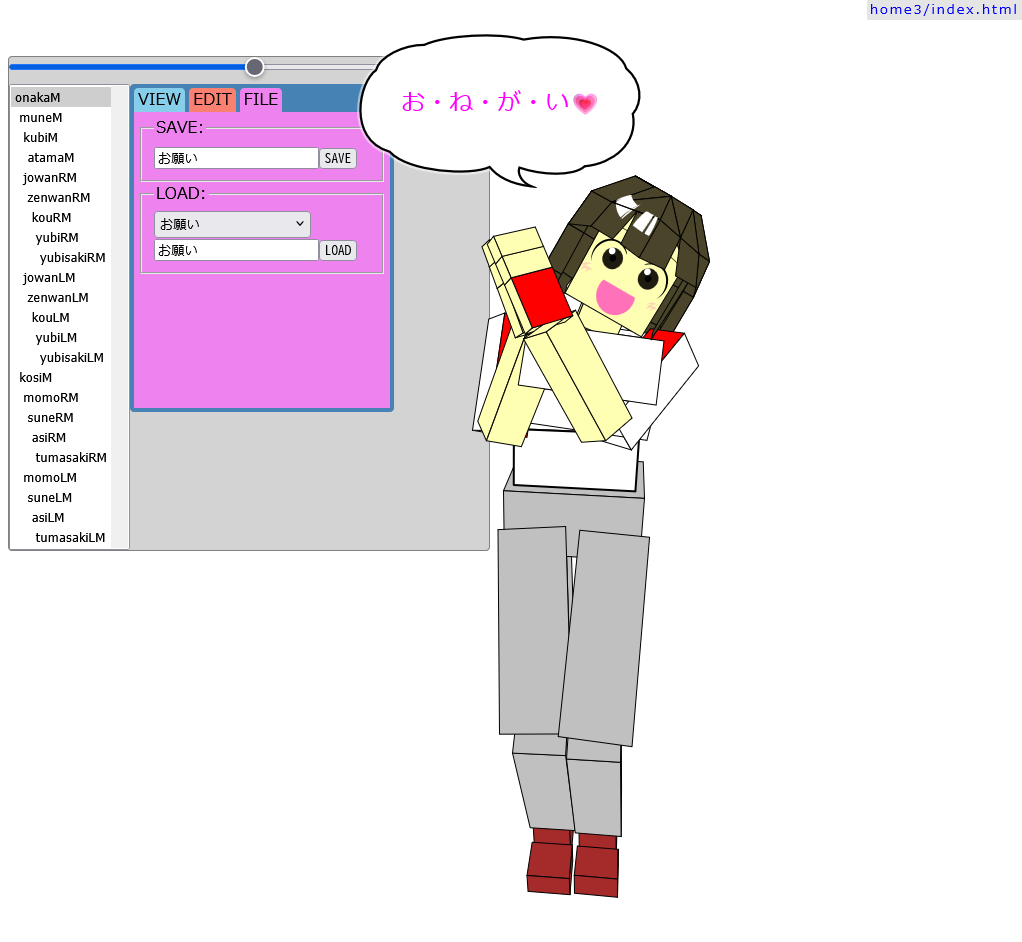
▼こんな感じで作ります。(MP4動画/8:05/201MB)
表示されている ~RM、~LM、~M というのは、右側モデル、左側モデル、モデル、という意味です。jowanLM なら、「左腕の上腕のモデル」という意味です。
一部、面を赤く塗っているのは、モデルの向きを確認するためです。上腕の赤い面は「上腕二頭筋のある側」、手の甲が赤いのも同じ意味です。ほとんど直方体の組み合わせなので区別しづらいんですよね。
この動画を作っている最中に、横に倒した人体の水平回転が、ジンバルロックによってできないことに気づいてしまいました。
その辺を直さないと、本当の自由は得られないので直さないといけません。
人体を全体的に回転するときは、クォータニオン(任意の1つの軸で1回で回転)ではなくオイラー(x, y, z 軸で3回で回転)で回転しているので、やりたい回転ができない場合があるんですよね。
オイラーでの回転は比較的やりやすいので最初の内はオイラーで回転することを楽しんだほうが良いです。私も何年だろう、10 年くらいはずっとオイラーでした。クォータニオンは始めてまだ 1 年くらいかな。
いきなりクォータニオンを手に取って、難しさに苦しんでもつまらないでしょう。
いつも言っていますが、ここまでの 3DCG プログラミングの中に「行列」はただの一片もありません。
本質的に必要ない、って言っても良いのかな。
行列を使う理由はたぶん(使ったことないので聞いた話によると)、
- 複数の計算を一度に行える
- 計算効率が良い(処理速度が早い?)
- 3DCG のハードウェアやライブラリ、フレームワークが行列を前提にしている
- 教えている本、ウェブサイト、教師が行列を使っている
、、というそういう理由かなと思います。最初から当たり前で使っているから、必要なのかと勘違いしてしまうのかもしれません。
(訪問者のどんなニーズと この記事がつながるか)
- 何か作っている取り組みの話
- 面白いものを見たい
- 日記を読みたい
2026年2月19日
事業会計 なんで事業者になったのか
私はなんで事業者になったのか、前にも書いた気がしますが、改めて書いておきます。
「イラスト AC」というサイトで自作のイラストを登録すると、そのイラストが人々から使われる(ダウンロードされる)たびにポイントがたまり、5000ポイントごとに5000円に換金できます。
インボイスが始まったことがきっかけで、イラスト AC から「事業者としてお金(換金)を受け取るか、単なるサービスの利用者としてお金(換金)を受け取るか、選んでください」と問われました。
そこで私はインボイスについて調べて、インボイスに登録したほうが(事業者登録したほうが)、私のイラストを利用する人にとっては都合が良いようだ、と結論して、事業者(適格請求書発行事業者)に登録したわけです。
そうすることで、私のイラストがもっと広く利用されるだろう、と考えました。
インボイスに登録していると、私のイラストを購入したのが会社だった場合に、その会社において「その費用にかかる消費税を、国に納める消費税から引き算できる」んですね。経費が安くなります。
インボイス登録がないと、それができません。経費が無駄に多くなります。
しかし、後から気づきましたが、「イラスト利用者」←→「イラスト AC」←→「私」 の関係を見ると、私が事業者でも事業者でなくても、利用者とイラスト AC にとっては金銭的に大きな違いはないっぽいです。
なんとなく、上記太字で示した部分の私の考えはちょっと無駄だったかもしれないんです。
でも、まぁ、考え方としては良い考え方だし、
また、事業者になるというのは、カラオケボックスで店長業務をやっていたころから何となくイメージしていたので、その実現のきっかけとなった、と言えます。
(訪問者のどんなニーズと この記事がつながるか)
- 事業の取り組みの話
- 日記を読みたい